
Offboard Occupancy Refinement With Hybrid Propagation for Autonomous Driving
发布时间:
2025年6月,课题组博士研究生时昊等人的论文《Offboard Occupancy Refinement With Hybrid Propagation for Autonomous Driving》发表于 T-ITS 期刊。
期刊介绍
IEEE Transactions on Intelligent Transportation Systems (T-ITS) 是 IEEE 旗下智能交通系统 (ITS) 领域的顶级期刊,专注于发表该领域的前沿理论、关键技术与应用成果。该期刊是ITS领域最具影响力的学术出版物之一,致力于推动智能交通系统的发展与创新。WOS期刊SCI分区大类及子类分区均为一区期刊,在ENGINEERING, CIVIL学科所有期刊中排名3/182 ,中科院SCI分区TOP期刊,最近5年平均影响因子IF=8.3。
论文主要图表
论文介绍
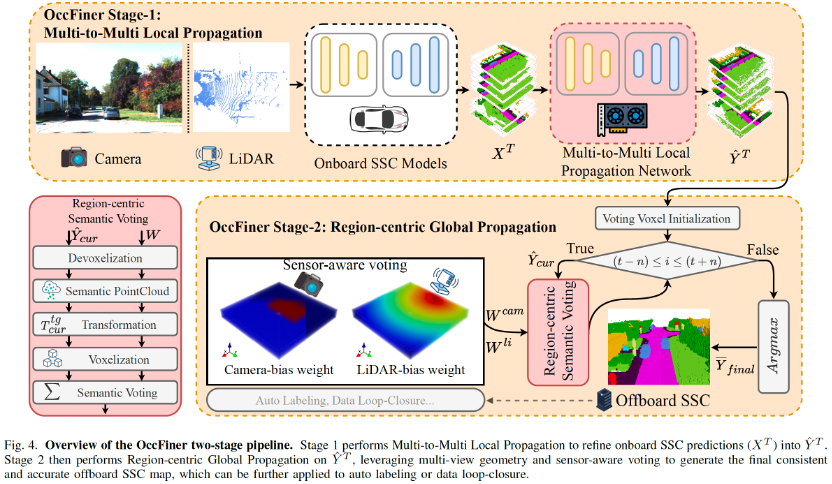
针对自动驾驶中基于视觉的3D语义场景补全(SSC)技术在车载环境下同时进行几何与语义估计、跨视角连续性以及单视角遮挡等方面的挑战,本文由浙江大学团队联合德国卡尔斯鲁厄理工学院、英国剑桥大学的研究者共同完成,提出了一种名为“OccFiner”的新型离线框架,旨在显著提升基于视觉的占据预测(occupancy prediction)的准确性和鲁棒性。论文第一作者为博士生时昊。 OccFiner创新性地采用了两阶段混合传播策略:
- 多对多局部传播 (Multi-to-Multi Local Propagation): 该阶段通过一个新颖的DualFlow4D变换器,隐式地对齐和处理多个局部帧序列,有效修正车载模型的预测偏差,并一致性地提升在所有距离上的占据预测精度。
- 区域中心全局传播 (Region-centric Global Propagation): 该阶段着重于利用显式的多视图几何信息和传感器偏差(sensor bias)的集成,通过对整个场景序列的数据进行聚合和投票,进一步精炼标签,特别是在提升远处被占据体素的准确性和多视图一致性方面表现突出。 OccFiner首次将多帧局部隐式误差补偿与非局部显式信息传播相结合,有效解决了车载模型的固有偏差、多视图不一致性以及单视角遮挡问题。我们在大规模公开数据集SemanticKITTI上进行了大量实验,结果表明,OccFiner不仅显著提升了现有基于视觉的SSC模型的性能(例如,相较于VoxFormer在mIoU上获得24.59%的相对提升),使其准确率达到甚至在某些方面超越了部分成熟的基于激光雷达(LiDAR)的车载SSC方法。更重要的是,OccFiner首次成功实现了纯视觉方法下的SSC数据闭环自动标注,并在城市级别的静态地图构建中验证了其优越性,能够生成大规模、一致性的3D语义地图。 这项工作不仅推动了3D语义场景补全技术在智能交通系统中的前沿发展,也为自动驾驶系统的数据闭环、模型自我进化以及降低高精地图标注成本提供了新的有效途径。我们期待该离线优化框架能在未来的自动驾驶感知系统中得到进一步研究与应用,促进更安全、更可靠的智能交通系统的实现。
代码仓库
BibTeX
@article{shi2025offboard,
title={Offboard occupancy refinement with hybrid propagation for autonomous driving},
author={Shi, Hao and Wang, Song and Zhang, Jiaming and Yin, Xiaoting and Wang, Guangming and Zhu, Jianke and Yang, Kailun and Wang, Kaiwei},
journal={IEEE Transactions on Intelligent Transportation Systems},
year={2025},
publisher={IEEE}
}