
One-Step Event-Driven High-Speed Autofocus
发布时间:
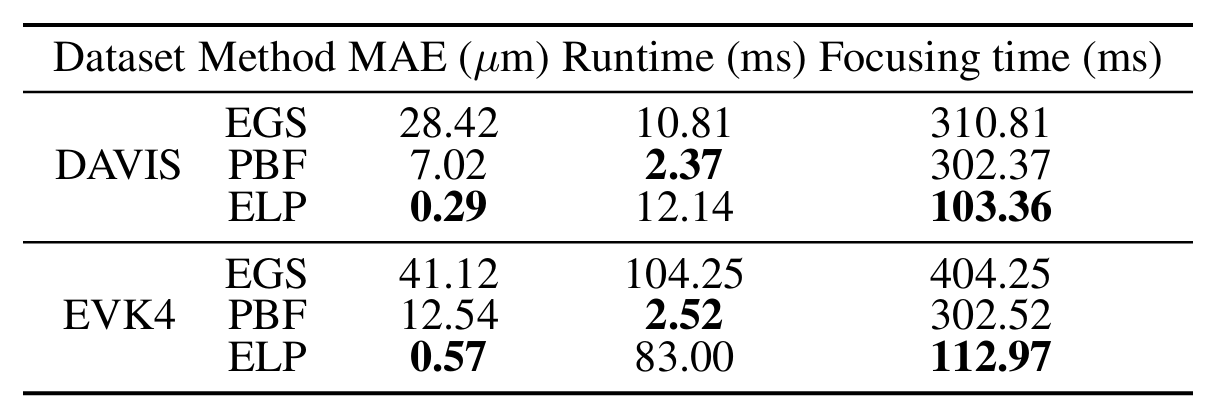
近日,浙江大学光电科学与工程学院汪凯巍、白剑教授团队在极端环境高速对焦领域取得了新进展。团队将事件相机提供的高时间分辨率亮度变化信息与灰度图像的空间二阶导相结合,提出并实现了一种事件辅助的一步到位自动对焦方法Event Laplacian Product (ELP),能够实时确定正确的对焦运动方向以及是否达到准焦位置,避免了传统对焦方法中的“拉风箱”问题,将对焦时间缩短了三分之二。研究团队在实验中验证了ELP方法在运动以及低于0.5lux的黑暗场景下的鲁棒性,确保了在夜间、手持拍摄等场景下的稳定表现。该研究成果理论坚实、方法简单有效,为高速对焦任务提供了全新可靠的解决方案。相关研究成果以“One-Step Event-Driven High-Speed Autofocus”为题,已被人工智能及计算机视觉领域最具影响力的国际顶级会议(CCF-A类)Conference on Computer Vision and Pattern Recognition (CVPR2025)接收。
研究背景
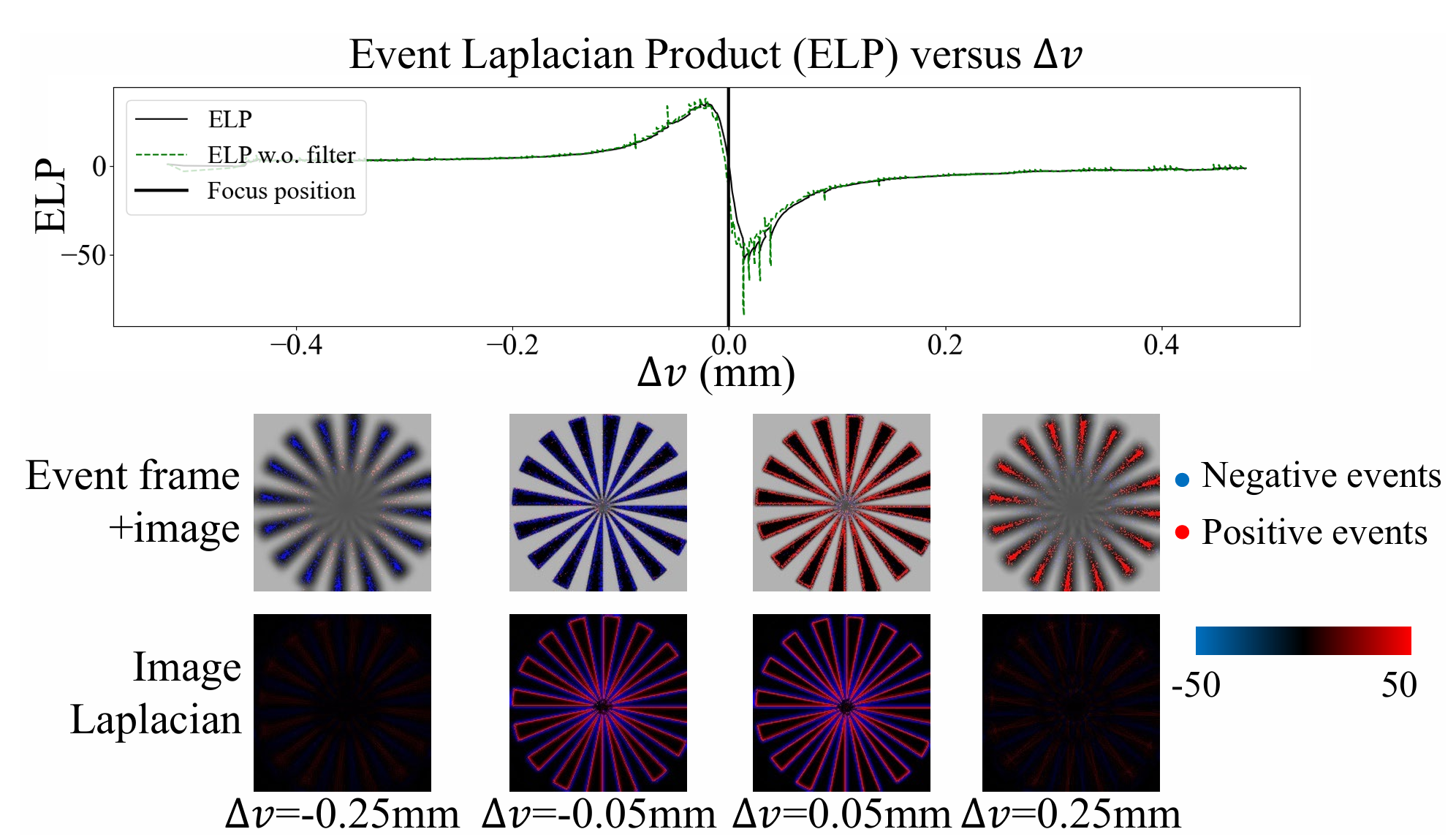
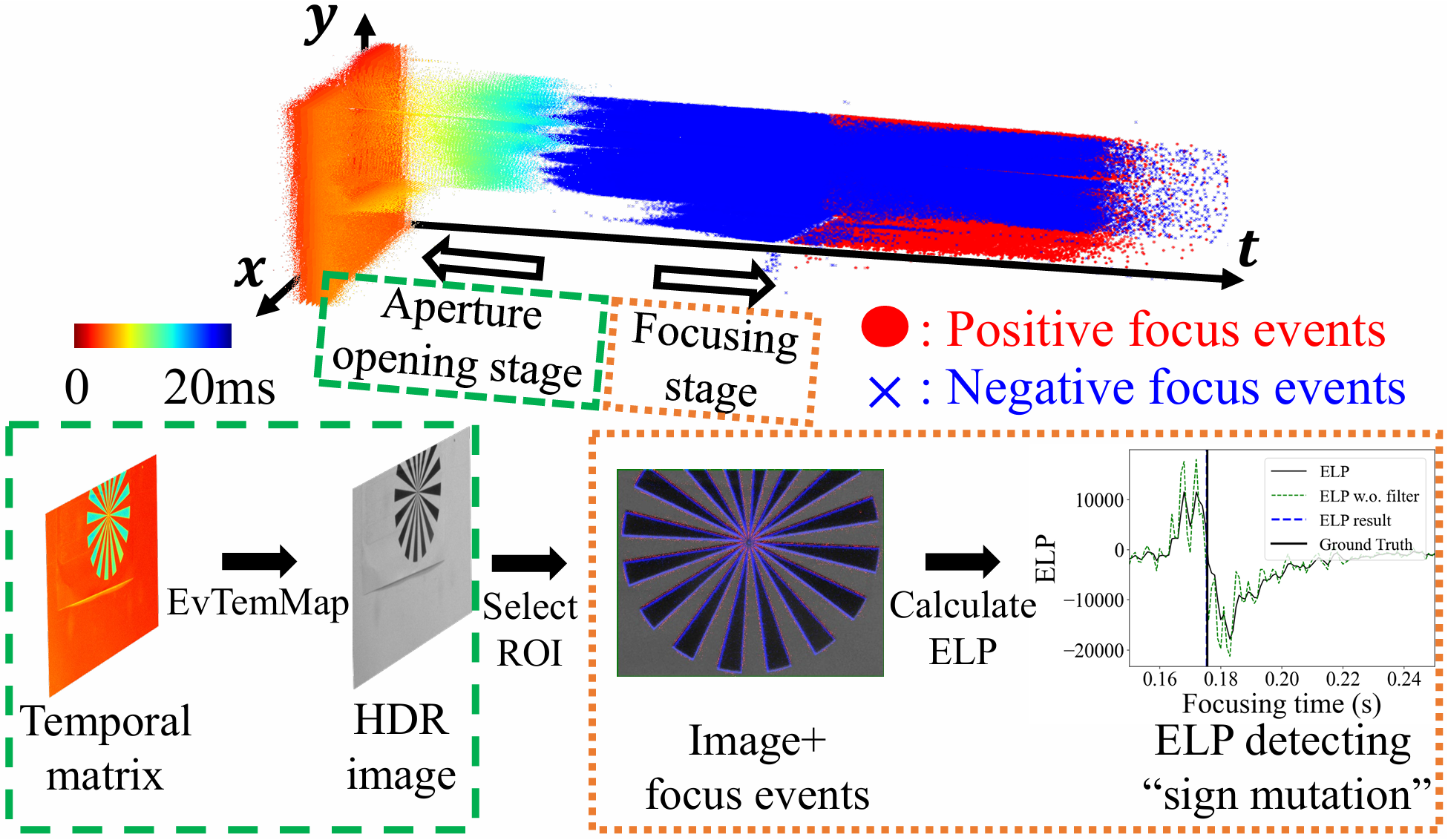
传统基于对比度的自动对焦方法通常依赖于在准焦位置附近反复采样,受制于图像采集帧率,在黑暗环境下会产生明显的“对焦拉风箱”效应,极大地延长对焦时间。现有的相位对焦法(PDAF)虽然可以有效地提升对焦速度,但在较暗的光照环境下表现不佳。 近年来,事件相机(event camera)凭借其极高的时间分辨率(可达到微秒级)、低延迟特性及良好的低光适应性,具有在高速对焦领域应用的潜力。事件相机通过检测每个像素的亮度变化,提供了比传统帧式相机更为高效的动态场景捕捉能力。然而,现有的事件驱动对焦方法仍然需要捕捉完整的对焦堆栈,才能从中搜索出准焦位置,这意味着对焦过程仍然需要经历一次“拉风箱”,导致对焦时间过长。 因此,如何实现一种无需反复采样搜索、无需采集完整对焦堆栈并能够在低光、复杂运动场景下精确快速对焦的方法成为研究的重点。基于这一目标,团队将给予明确场景纹理、但帧率低的灰度图像,与高时间分辨、但仅能提供亮度变化信息的事件,结合起来,同时解决了仅基于图像和仅基于事件的自动对焦法中存在的局限,真正实现了一步到位的自动对焦。
论文主要图表
总结展望
综上所述,团队成功开发了一种在低光、运动场景下依然适用的事件辅助一步到位高速对焦方法。基于这个方法,并结合团队的前期工作,团队还设计了一种纯靠事件运行的一步到位高速对焦系统,适合在纯事件相机上运行。本方法有望在手机摄影、高端相机摄影面向复杂场景的高速对焦、跟焦、追焦任务中发挥重要作用。此外,该方法还可以推广至自动对焦的相关其他视觉应用中,如基于对焦的深度估计等任务。